对于自动驾驶技术,我们期待并不断为之努力着。但是在其未实现之前,我们依然可以使用自适应巡航控制保证在高速路上的伪自动驾驶。

自适应巡航控制来源于常规巡航控制,这项技术已经出现了几十年,但是在后续的更新进化中,应巡航控制可以像常规巡航控制那样保持一定的速度,但也可以根据交通流量变化速度。这种技术可以使巡航控制更加有用,减少了驱动程序的工作负荷。
技术原理
自适应巡航控制也被称为动态雷达巡航控制或智能巡航控制,不同汽车制造商对其系统有自己的品牌名称。但是归根结底,它们都是同样的效果,根据汽车周围的道路环境,自动进行加速或减速,从而减少人类驾驶员的工作量。

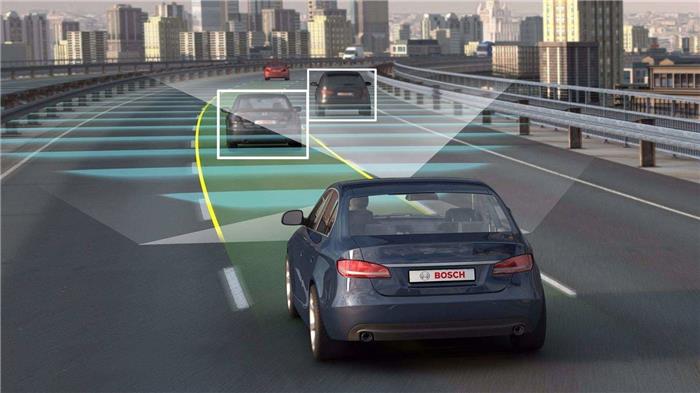
要做到这一点,汽车必须配备传感器,使其能够探测到附近的车辆和潜在的障碍。目前大多数的系统都是用雷达,也有一些车商采用相机和激光雷达来达到相同的效果。一般相机位置在于格栅或挡风玻璃后面,而雷达则位于格栅中扁平的塑料面板后面。计算机通过传感器来控制节气门,转向和刹车。

一个基本的自适应巡航控制系统只需要处理加减速的操作就行了,这可以通过汽车前方的传感器达到这一操作,通过保持一定的距离和速度就可以完成伪自动驾驶。一些汽车制造商在此基础之上,添加了更强的制动能力和有限的自动转向功能,从而提供了更舒适的驾驶环境,市面上的特斯拉自动驾驶仪和日产ProPilot辅助就是这样打造的。
自适应巡航控制是电子驾驶辅助设备的核心,一些汽车制造商认为这可以构成完全自主驾驶的基础。而在这个进化的过程中,雷达就起到了关键作用,而更多雷达的加入就能提供更详细的道路信息,从而完成对自动驾驶的辅助。
在目前的情况下,自适应巡航控制可以让你在漫长枯燥的高速驾驶之旅中变得轻松,但是这项技术不适用于市区或其他复杂的道路,毕竟这项技术说到底只是辅助驾驶,而不是代替人类驾驶员。
无论是自适应巡航还是无人驾驶,这些技术都是为了让人们更加轻松,但是这些技术的缺陷同样明显,它们的驾驶水平明显比不上熟练的老司机,而且在随机应变和处理道路情况的方面,甚至完全比不过人类驾驶员。
市面上有不少搭载了自适应巡航的车型,但是这些更像是一个昂贵的大玩具,如果你不想自己开车,那为什么不选择打车呢?
(关键字:适应 自动)